Pure Pursuit Variation
Pure Pursuit
Section titled “Pure Pursuit”Pure Pursuit is a geometric path-tracking algorithm widely used in autonomous vehicles and mobile robotics to follow a predefined sequence of 2D waypoints.
Learn More on the BLRS Wiki
The rest of this article will presume that you have the necessary knowledge about pure pursuit. So, it’s important to make sure that you’re well familiar with this algorithm.
Terminology
Section titled “Terminology”Here is a few words that we’ll be using that might differ from other articles, and hence, are good to take note of:
- Point: A dimensionless object with an
xandyvalue - Path: An ordered collection of Waypoints
- Waypoint: A point on the Path with a
tValue - Circle: A imaginary circle around the position of the robot
- Lookahead Distance: A constant that acts as the radius of the Circle
tValue: An index used to represent the position of a Waypoint in a Path. The first Waypoint(or origin) will have atValue of0.0. The next Waypoint will have atvalue of1.0. A Point in the midpoint these 2 Waypoints may have atvalue of0.5. (tvalues are optional for Points)
How Pure Pursuit works
Section titled “How Pure Pursuit works”- Find the robot’s current position on or near the path.
- Construct a lookahead circle centered on the robot.
- Find the intersection(s) of the path with that circle.
- Select the forward intersection.
- Drive toward that point.
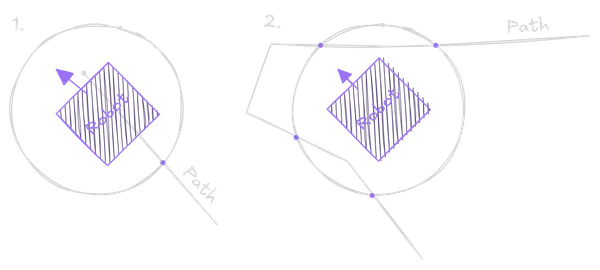
Issues with standard Pure Pursuit Implementations
Section titled “Issues with standard Pure Pursuit Implementations”While the standard implementation works pretty well under normal circumstances, but there are a couple of situations where the algorithm might not be able to handle right without much custom logic.
Some examples include:
- Only 1 intersect at the end of Path
- More than 2 intersects between the Circle and Path
These issues are usually fixed using custom logic that run when such scenarios occur. However, there is a much simpler and easier way to handle all of this.
Candidate-Based Pursuit (CBP) Algorithm
Section titled “Candidate-Based Pursuit (CBP) Algorithm”The CBP algorithm was created to handle the many edge-case scenarios that Pure Pursuit cannot handle and aims to be a significantly more robust variation. Under normal circumstances, the CBP algorithm returns identical output compared to the original Pure Pursuit algorithm. However, there are significant improvements in how the CBP handles errors.
Candidates
Section titled “Candidates”Unlike traditional pure pursuit, CBP does not attempt to derive only a single point for the robot to move to. Rather, it first finds multiple points (or candidate points) that the robot can set as target. By doing so, the robot will always find at least one possible point.
Architecture
Section titled “Architecture”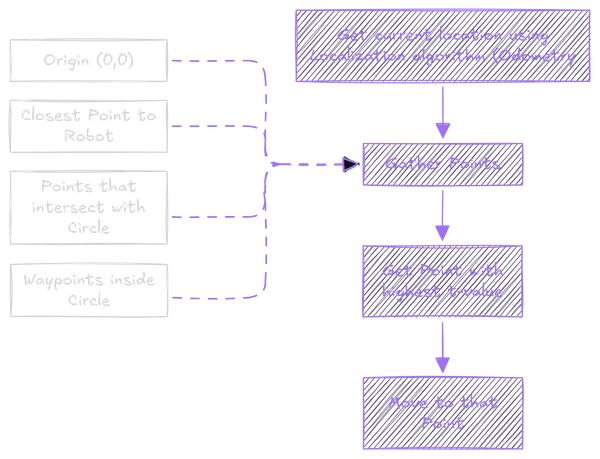
Pros and Cons
Section titled “Pros and Cons”| Traditional Pure Pursuit | Candidate Based Pursuit | |
|---|---|---|
| Custom Logic | Needs custom logic in multiple areas of the program | No custom logic needed |
| Robust | Robustness depends on how custom logic is implemented | Very robust without custom logic |
| Performance | Usually slightly faster | Might be less performant due to extra calculations |
| Ease of Developement | Harder as custon logic has to be implemented for every scenario | Generally easier |
Implementations
Section titled “Implementations”An implementation can be found in the Antaeus repository. Unfortunately, readability of code was not a top priority at that time and, rather, there was a focus on brevity. Hence, much of the code is quite hard to understand for a beginner. It is recommended that you are at least somewhat proficient in Rust and programming before viewing the file.
View Antaeus Repository